Objectif du projet
Utiliser la richesse des informations disponibles dans OpenStreetMap et les valoriser sous la forme d’une pseudo « BDTOPO® | IGN » afin qu’elles puissent facilement être exploitées dans une application SIG.
Consulter le projet sur Github
Pourquoi cette idée ?
Je rejoins ce qu’à écrit P. Archambault au sujet des données OSM et de leur utilisation par des géomaticiens :
La structure de la base de données sous-jacente est […] un peu complexe et nécessite un investissement chronophage pour réussir ses extractions. Il faut quelques connaissances en géomatique pour plonger dans le bain de données OSM. Le format du fichier .osm, xml tout en un, est déroutant pour les utilisateurs de SIG et les statisticiens. Le fichier .osm est un format texte balisé (xml) facile à manipuler par les développeurs. Mais il l’est beaucoup moins par les analystes. Les informations ne sont pas tabulées en colonne et les objets géographiques sont, le plus souvent, mal lus par les SIG classiques. QGIS réussit à lire nativement les fichers .osm. Mais il est impossible d’espérer lire et requêter sur un fichier France.osm directement : les structure et volumétrie de données […] ne passent pas…
Source : Comment accéder en masse aux informations vectorielles d’Open Street Map ?
Partant de ce constat, l’idée était donc de trouver une solution permettant d’exploiter la masse d’informations présente dans OSM pour en faire un produit « SIG » facilement exploitable.
Les données générées
Télécharger les données générées sur la France métropolitaine (Découpage suivant les anciennes régions)
Attention : Les fichiers générés ne respectent pas les spécifications de la BD TOPO ils visent seulement à s’en rapprocher pour pallier à un besoin de données/informations.
Origine des données
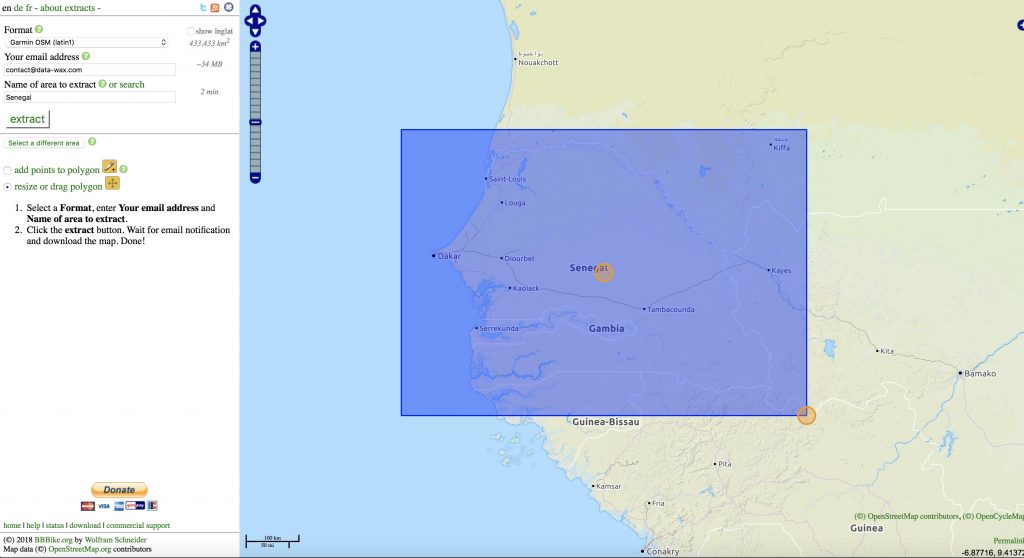
Les données OSM utilisées pour générer ces fichiers régionaux proviennent de Geofabrik.
Il est possible d’utiliser des données OSM provenant d’autres sources.
Le mot de la fin
Merci de nous faire remonter : les erreurs et/ou les problèmes que vous rencontrez.
Pour toute question concernant le projet ou le jeu de données, vous pouvez nous contacter par mail.



 `
`